Teams
Steadiness
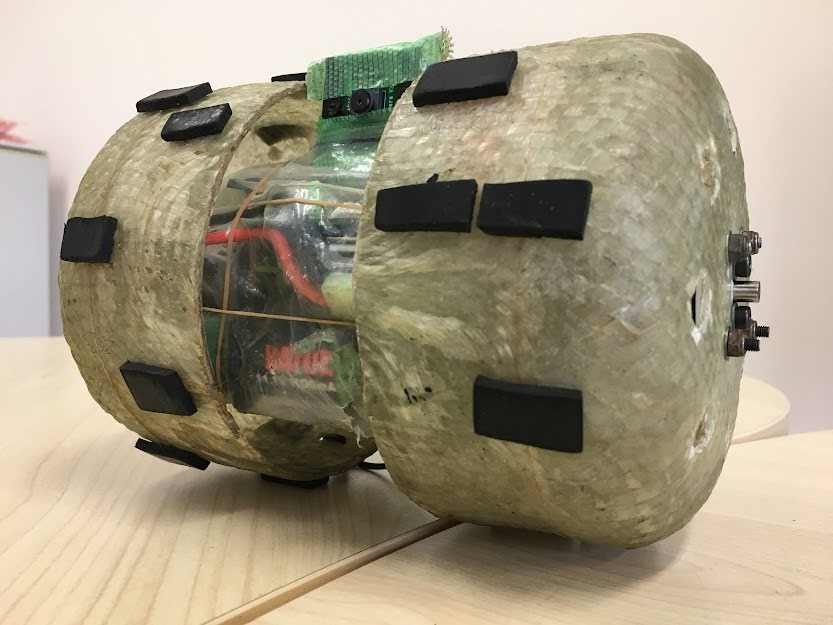
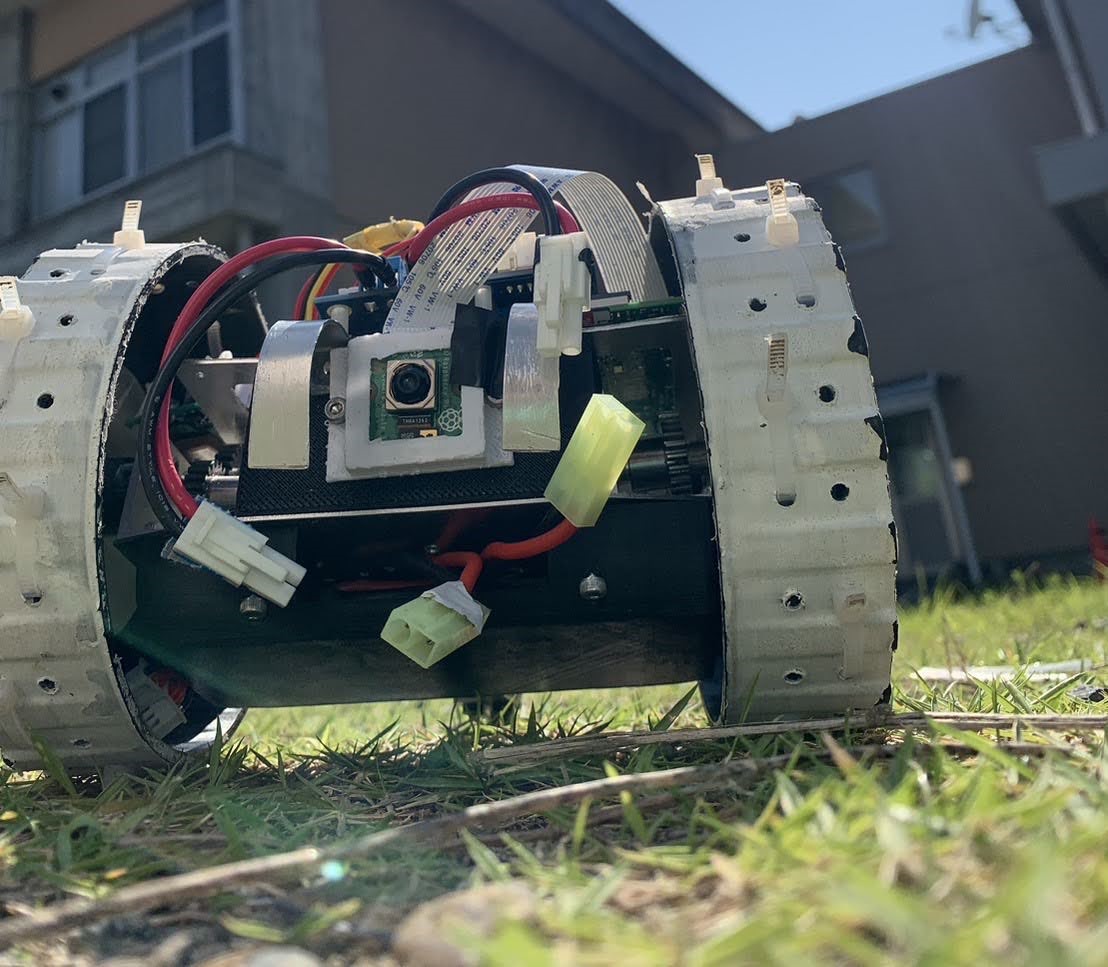
Steadinessは2020~2022年活動していたランバックチームである。Steadinessは本プロジェクトでも特に正確な誘導性能を持ち、シングルボードコンピュータであるRaspberryPi4とカメラを用いて目標地点から0m台でのゴール判定が可能な機体を開発した。さらに搭載されている強いモーターと強化繊維プラスチックで作られたタイヤは様々な環境での走破性の向上に貢献している。
開発チーム コメント
Steadinessの名前の通り、安定した制御を目標にランバック機体の開発を行っています。カメラで0m目指して頑張ります。
HOTOGI
HOTOGIは2021~2023年活動していたランバックチームである。HOTOGIが製作する機体はパラシュートと機体を切り離す解放機構においてスタビライザーを動作させるという異なる方式を採用している。また、カメラ制御に加えインターネットを介した通信など機械、電装の両方で新しい技術の開発に取り組んでいる。
開発チーム コメント
HOTOGIでは様々な部分でこれまでになかった新しいアイデアを取り込んだ機体を開発しています。大会での好成績を目指して頑張ります。
Odyssey
Odysseyは2022~2023年活動していたランバックチームである。Odysseyは本プロジェクトでも特に走破性に特化しており、障害物の多い路面でも難なく走行することができる。さらに、9軸センサーとGPSによる正確な制御により機体を確実にゴール地点へ導く。

開発チーム コメント
チームOdysseyです!手探りで開発を開始し、やっと完成することができました。先輩たち製作した機体を模倣した形ですが、これから私たちの機体へ改良していく予定です!
Regulus
Regulusは2023年活動していたランバックチームである。Regulusが製作する機体はパラシュートと機体を切り離す解放機構において前進させることで開放する方式を採用し、スタビライザーはマジックハンドの機構を採用している。また、電装部においてはカメラを用いた色検知による制御を行い、0mゴールを目指す機体となっている。
開発チーム コメント
Regulusは能代宇宙イベントに向けて機体の調整を繰り返してきました。変わった機構を採用しているので是非色々聞いてください!
Pleiades
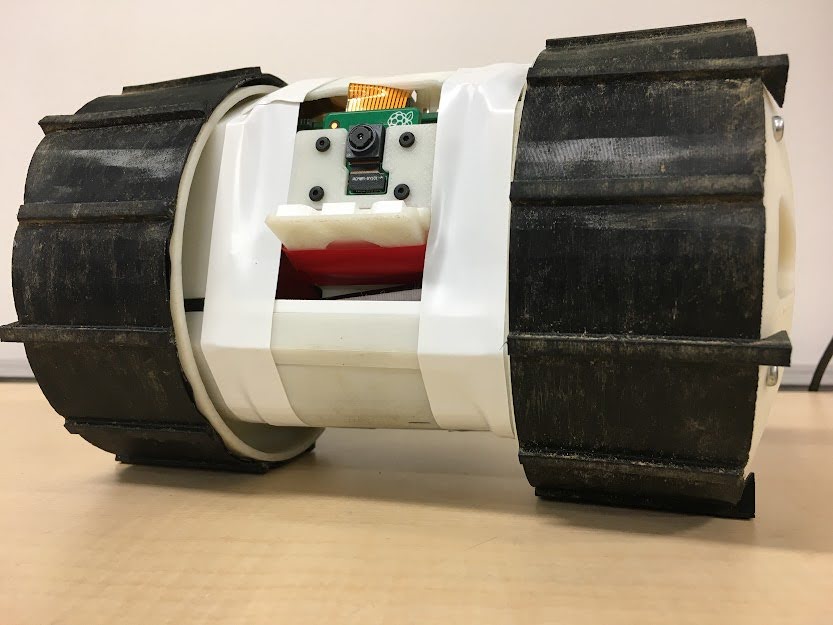
Pleiadesは2024年活動していたランバックチームである。PleiadesはTPU(熱可塑性ポリウレタン)を使用した拡張タイヤを使用することで、起伏が激しい草地の走行を可能にした。また、制御によりパラシュートを分離・認識することで、パラシュートに絡まらない機体である。GPSとカメラを用いて、確実に0mゴールを目指す。
開発チーム コメント
Pleiadesは、どのような環境でも確実にゴール地点に到達することを目標に開発を行っています。先輩たちが開発した機体の性能を参考に、改良を重ねて最高の機体が作れるように頑張ります!
OverLights
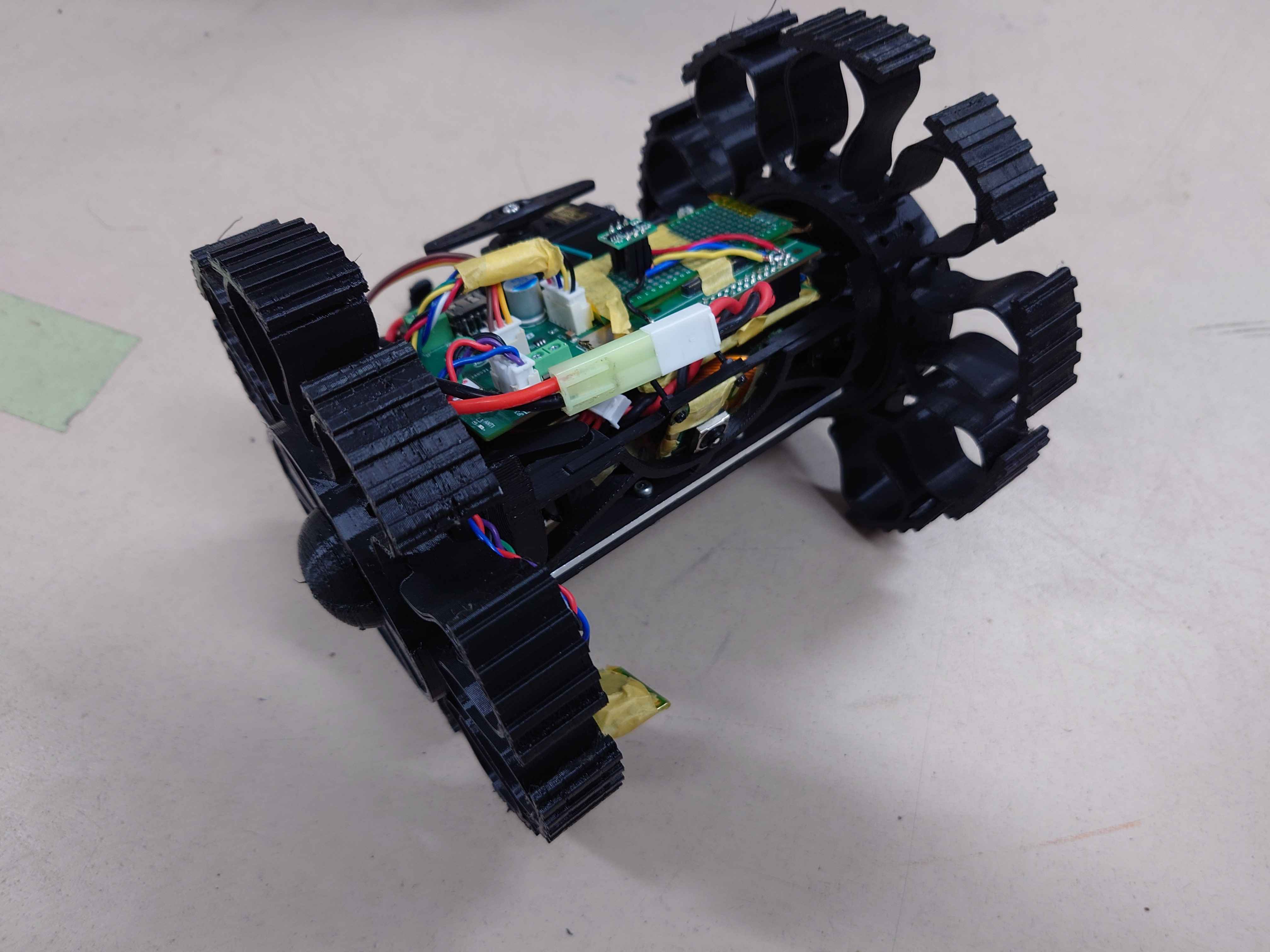
OverLightsは2024年活動していたランバックチームである。OverLightsはHOTOGI , Odyssey , Regulusの共同チームである。OverLightsが製作する機体は独自のギアボックスと変形するタイヤを用いることで、コンパクトなフォルムとなっている。また、GFRP(ガラス繊維強化プラスチック)とTPU(熱可塑性ポリウレタン)のハイブリットタイヤにより、拡張性と機械特性の両方を追求している。さらに電装部においては、リフロー等による基板の小型化を図ることでCM4や様々なセンサを搭載し、より確実なゴールを目指す機体となっている。

開発チーム コメント
OverLightsは2023年秋に発足して以来、学年の垣根を越えて協力して開発してきました!アメリカで開催されるCanSatの世界大会ARLISSでの勝利をつかむためのチームです。長距離走行を実現し、より確実な0mゴールを目標としているので、ぜひ応援よろしくお願いします!!

Alsomitra
Alsomitraは2021年活動していたフライバックチームである。新潟大学としては初のフライバックチームである。デュアルコア搭載のRaspberry Pi Picoを用いており、常に9軸センサーの値を監視しながら制御することで、フライバックの少ない滞空時間でも即座に外乱に反応することを可能にした。

開発チーム コメント
メンバー常時募集中です!飛行機の開発も進めていく予定なので航空系に興味のある方は一緒に新潟で活動しましょう!

TOKI
NiCsのロケット部門2021年のチームでハイブリッドロケットの開発を行っている。新潟大学としては初である打ち上げに成功した。

開発チーム コメント
新潟県鳥であるトキの名前から名付けられたチームです!
ASUKA
NiCsのロケット部門2022年のチームでハイブリッドロケットの開発を行っている。ロケットエンジンには液体燃料と固体燃料を利用し、高度約300mまでの上昇が可能である。

開発チーム コメント
私たちのロケットが無事に飛ぶかドキドキだが、今までの努力が報われ、みんなの思いをのせ、無事に打ち上げられるように頑張ります。
Albireo
NiCsのロケット部門2023年のチームでハイブリッドロケットの開発を行っている。ロケットエンジンには液体酸化剤と固体燃料を利用し、高度約300mまでの上昇が可能である。

開発チーム コメント
パラシュートを解放して機体を損傷なしで回収することを目指して打ち上げます!